|
| | BSConstraintSpring (BulletWorld world, BulletBody obj1, BulletBody obj2, Vector3 frame1Loc, Quaternion frame1Rot, Vector3 frame2Loc, Quaternion frame2Rot, bool useLinearReferenceFrameA, bool disableCollisionsBetweenLinkedBodies) |
| |
| bool | SetAxisEnable (int pIndex, bool pAxisEnable) |
| |
| bool | SetStiffness (int pIndex, float pStiffness) |
| |
| bool | SetDamping (int pIndex, float pDamping) |
| |
| bool | SetEquilibriumPoint (int pIndex, float pEqPoint) |
| |
| bool | SetEquilibriumPoint (Vector3 linearEq, Vector3 angularEq) |
| |
| | BSConstraint6Dof (BulletWorld world, BulletBody obj1, BulletBody obj2) |
| |
| | BSConstraint6Dof (BulletWorld world, BulletBody obj1, BulletBody obj2, Vector3 frame1, Quaternion frame1rot, Vector3 frame2, Quaternion frame2rot, bool useLinearReferenceFrameA, bool disableCollisionsBetweenLinkedBodies) |
| |
| | BSConstraint6Dof (BulletWorld world, BulletBody obj1, BulletBody obj2, Vector3 joinPoint, bool useLinearReferenceFrameA, bool disableCollisionsBetweenLinkedBodies) |
| |
| | BSConstraint6Dof (BulletWorld world, BulletBody obj1, Vector3 frameInBloc, Quaternion frameInBrot, bool useLinearReferenceFrameB, bool disableCollisionsBetweenLinkedBodies) |
| |
| bool | SetFrames (Vector3 frameA, Quaternion frameArot, Vector3 frameB, Quaternion frameBrot) |
| |
| bool | SetCFMAndERP (float cfm, float erp) |
| |
| bool | UseFrameOffset (bool useOffset) |
| |
| bool | TranslationalLimitMotor (bool enable, float targetVelocity, float maxMotorForce) |
| |
| bool | SetBreakingImpulseThreshold (float threshold) |
| |
| | BSConstraint (BulletWorld world) |
| |
| virtual void | Dispose () |
| |
| virtual bool | SetLinearLimits (Vector3 low, Vector3 high) |
| |
| virtual bool | SetAngularLimits (Vector3 low, Vector3 high) |
| |
| virtual bool | SetSolverIterations (float cnt) |
| |
| virtual bool | CalculateTransforms () |
| |
| virtual bool | RecomputeConstraintVariables (float mass) |
| |
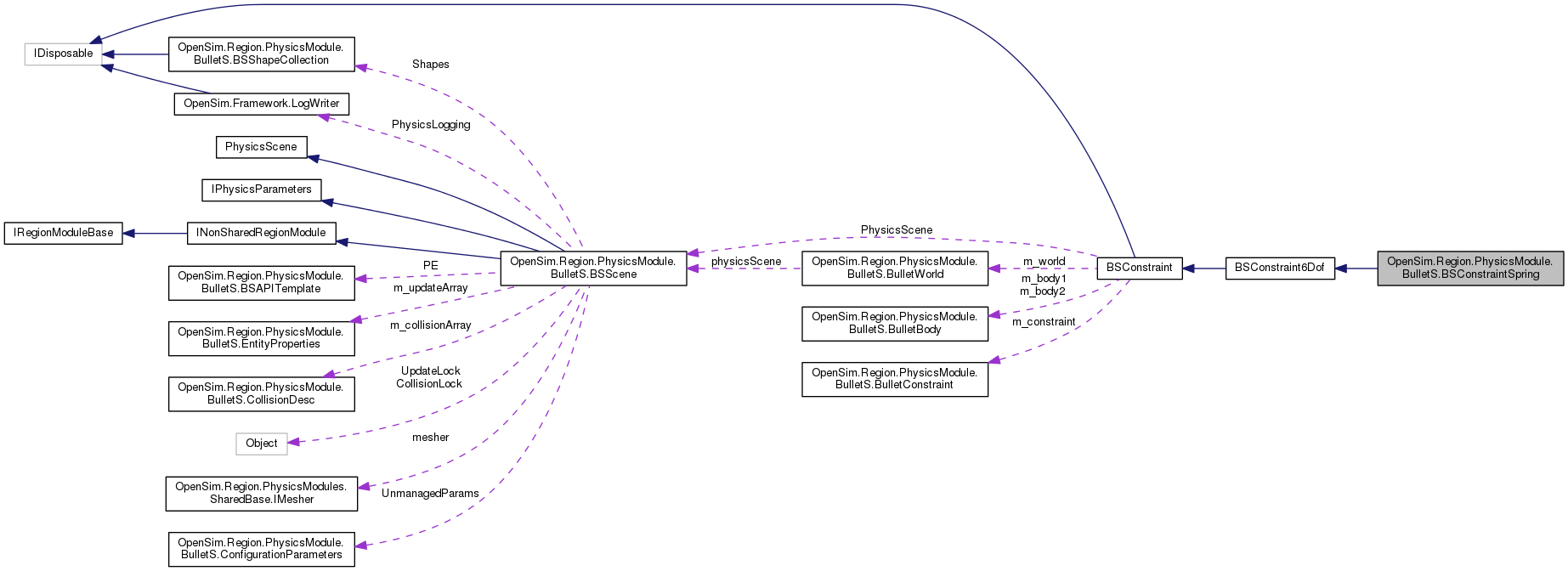
Definition at line 35 of file BSConstraintSpring.cs.


 Public Member Functions inherited from OpenSim.Region.PhysicsModule.BulletS.BSConstraint6Dof
Public Member Functions inherited from OpenSim.Region.PhysicsModule.BulletS.BSConstraint6Dof 1.8.6
1.8.6